Andrade-Pacheco, R., Mubangizi, M., Quinn, J., Lawrence, N.D., 2014.
Consistent mapping of government malaria records across a changing
territory delimitation. Malaria Journal 13.
https://doi.org/10.1186/1475-2875-13-S1-P5
Della Gatta, G., Bansal, M., Ambesi-Impiombato, A., Antonini, D.,
Missero, C., Bernardo, D. di, 2008. Direct targets of the TRP63
transcription factor revealed by a combination of gene expression
profiling and reverse engineering. Genome Research 18, 939–948.
https://doi.org/10.1101/gr.073601.107
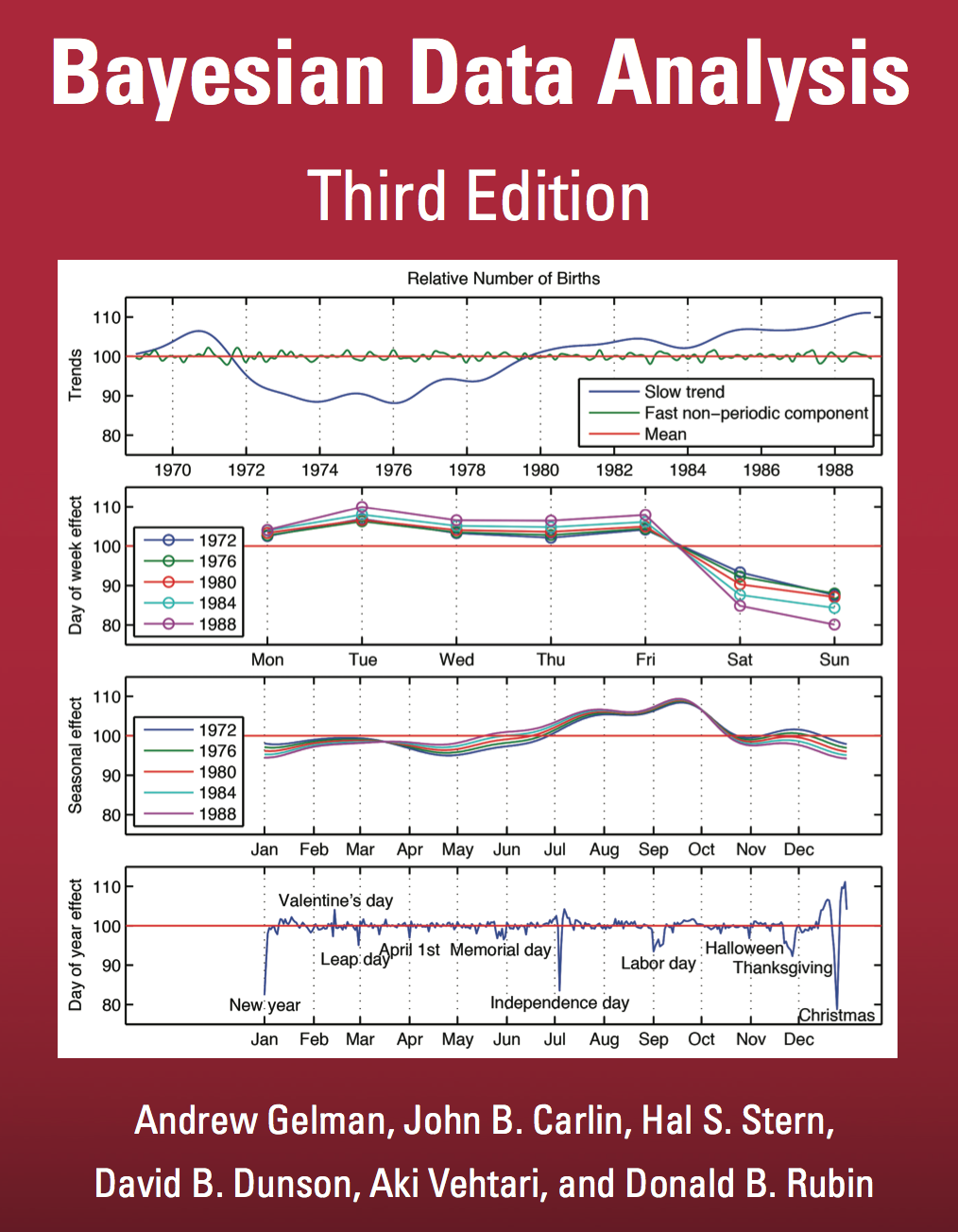
Gelman, A., Carlin, J.B., Stern, H.S., Dunson, D.B., Vehtari, A., Rubin,
D.B., 2013. Bayesian data analysis, 3rd ed. Chapman; Hall.
Kalaitzis, A.A., Lawrence, N.D., 2011. A simple approach to ranking
differentially expressed gene expression time courses through
Gaussian process regression. BMC Bioinformatics 12.
https://doi.org/10.1186/1471-2105-12-180
MacKay, D.J.C., 1992. Bayesian methods for adaptive models (PhD thesis).
California Institute of Technology.
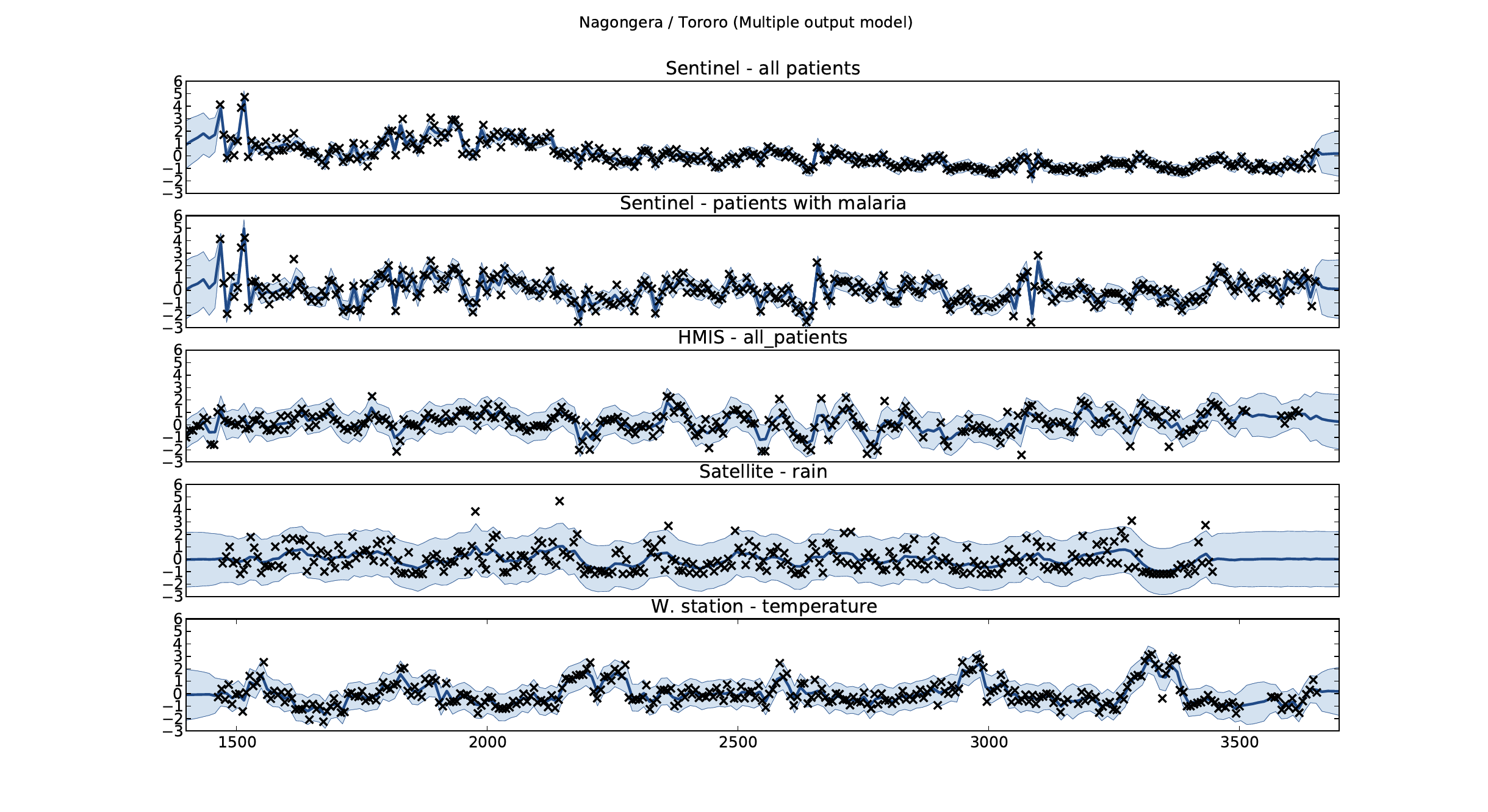
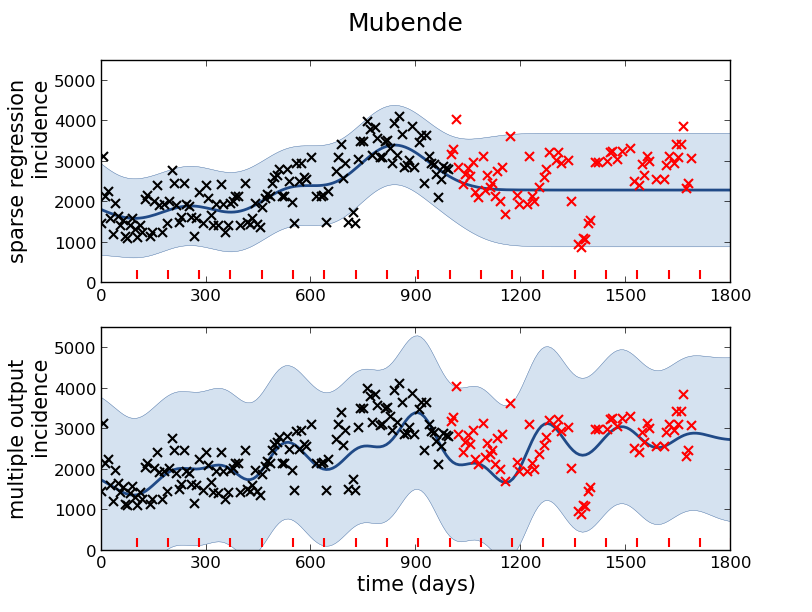
Mubangizi, M., Andrade-Pacheco, R., Smith, M.T., Quinn, J., Lawrence,
N.D., 2014. Malaria surveillance with multiple data sources using
Gaussian process models, in: 1st International Conference
on the Use of Mobile ICT in Africa.
Neal, R.M., 1994. Bayesian learning for neural networks (PhD thesis).
Dept. of Computer Science, University of Toronto.