Emulation
Virtual GPSS
We may regard the present state of the universe as the effect of its past and the cause of its future. An intellect which at a certain moment would know all forces that set nature in motion, and all positions of all items of which nature is composed, …
… if this intellect were also vast enough to submit these data to analysis, it would embrace in a single formula the movements of the greatest bodies of the universe and those of the tiniest atom; for such an intellect nothing would be uncertain and the future just like the past would be present before its eyes.
— Pierre Simon Laplace (Laplace, 1814)
Game of Life
Loneliness
|
|
Crowding
|
|
Birth
|
|
Glider
|
|
Loafer
|
|
\[ \text{data} + \text{model} \stackrel{\text{compute}}{\rightarrow} \text{prediction} \]
Laplace’s Gremlin
Philosophical Essay on Probabilities Laplace (1814) pg 5

Simulation System
Monolithic System
Service Oriented Architecture
Experiment, Analyze, Design
A Vision
We don’t know what science we’ll want to do in five years’ time, but we won’t want slower experiments, we won’t want more expensive experiments and we won’t want a narrower selection of experiments.
What do we want?
- Faster, cheaper and more diverse experiments.
- Better ecosystems for experimentation.
- Data oriented architectures.
- Data maturity assessments.
- Data readiness levels.
Statistical Emulation
Emulation
Emulation
Emulation
Emulation
Emulation
Emukit
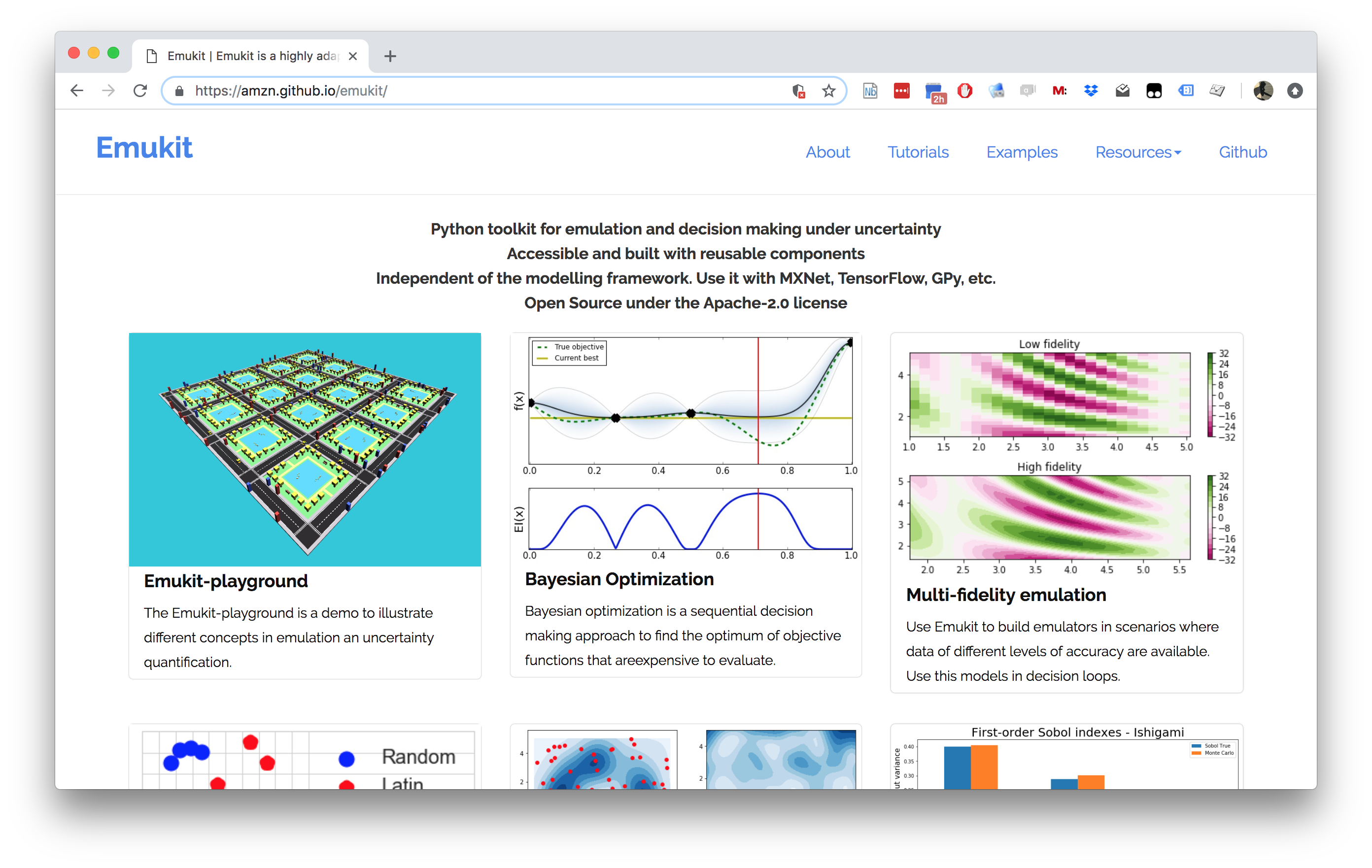
Emukit
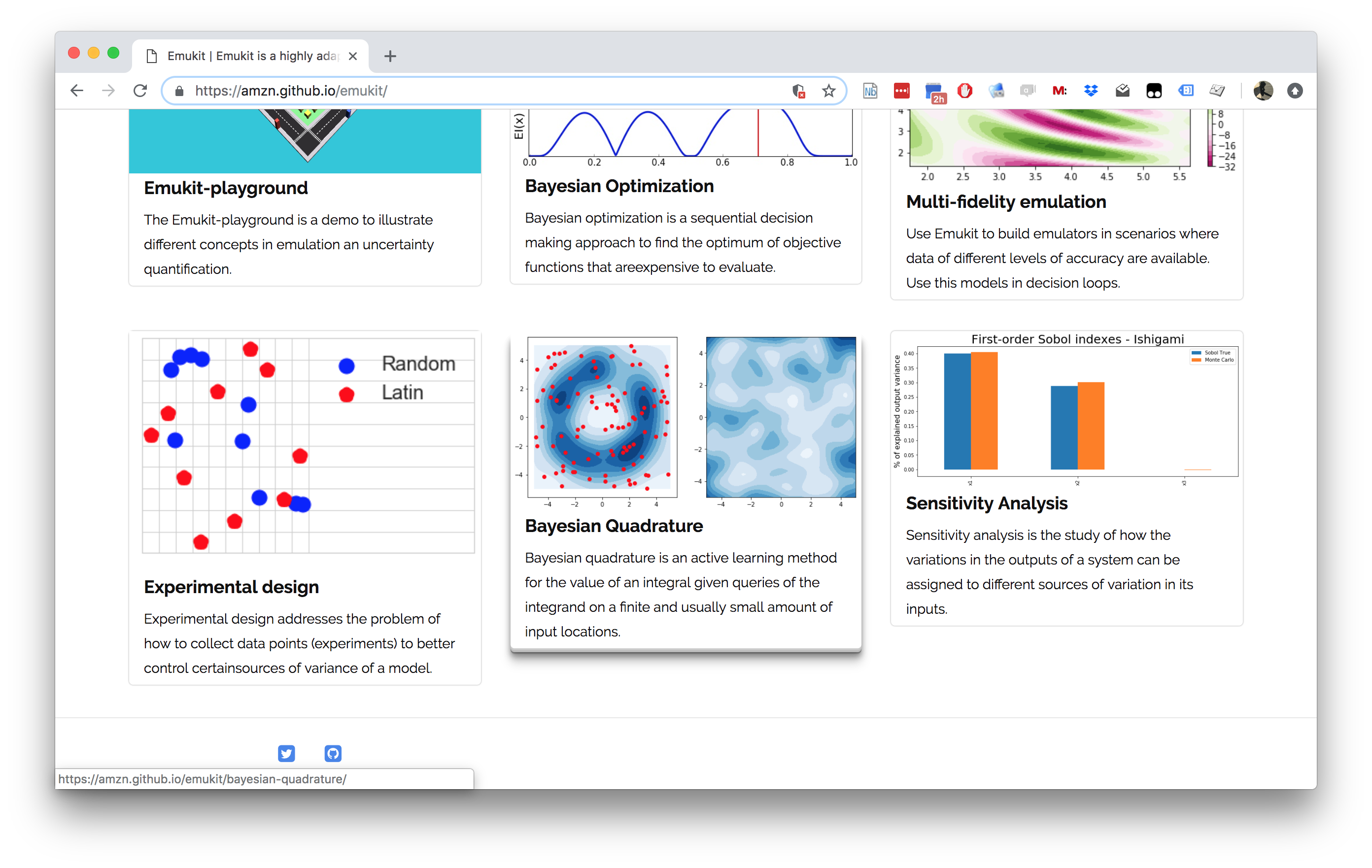
Emukit
- Led by: Javier Gonzalez and Andrei Paleyes
- Team: Mark Pullin, Maren Mahsereci, Alex Gessner, Aaron Klein, Henry Moss and David-Elias Künstle.
- Management: Cliff McCollum & Neil
- Available on Github
- Example sensitivity notebook, documentation https://emukit.readthedocs.io/en/latest/
Modular Design
Introduce your own surrogate models.
To building your own model see this notebook.
Structure
- loop
- model
- candidate point calculator
- acquisition
- acquisition optimizer
- user function
- model updater
- stopping condition
Emukit Vision
Emukit and Emulation
Methods
- The different methods: Bayesian optimization, experimental design.
Models
- The probabilistic model that will be used to emulate. Emukit doesn’t define these, the user brings their own.
Tasks
- Still in development: High level goals that owners of the process/simulator might be actually interested in. Examples: measure quality of a simulator, explain complex system behavior.
Structure
while stopping condition is not met:
optimize acquisition function
evaluate user function
update model with new observationLoop
- An abstract class where the different components come together.
Model
- The surrogate model or emulator, often a Gaussian process.
Candidate Point Calculator
- The routine that combines acquisition with optimizer to compute the next candidate point (or points).
Acquisition
- Our acquisition function: in Bayesian Optimization, this might be Expected Improvement.
Acquisition Optimizer
- The optimization routine we use to optimize the acquisition function. (often this is a non-linear optimizer like L-BFGS (Byrd et al., 1995))
User Function
- The function we’re trying to reason about.
Model Updater
- How to update our surrogate model when we have new training data.
Stopping Condition
- How to decide when to stop our cycle of data acquisition from the target function.
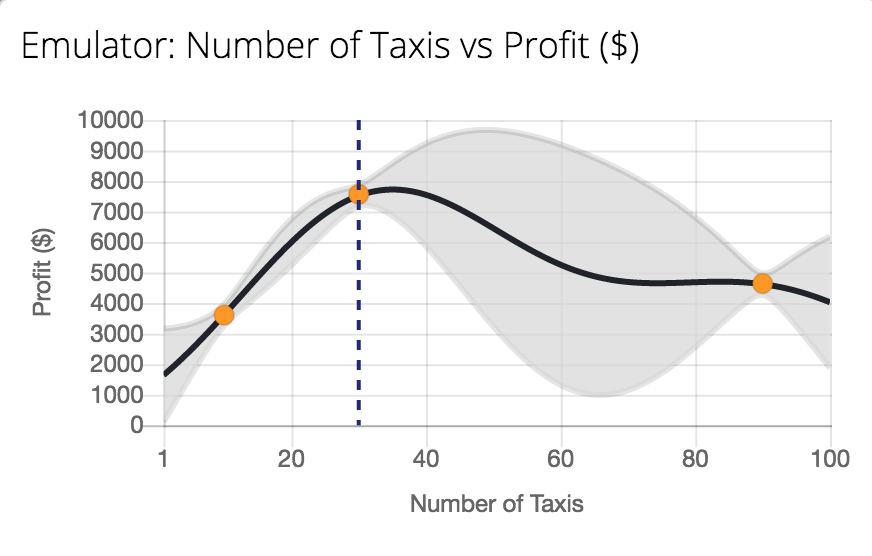
Emukit Playground
Work Leah Hirst, Software Engineering Intern and Cliff McCollum.
Tutorial on emulation.
Emukit Playground
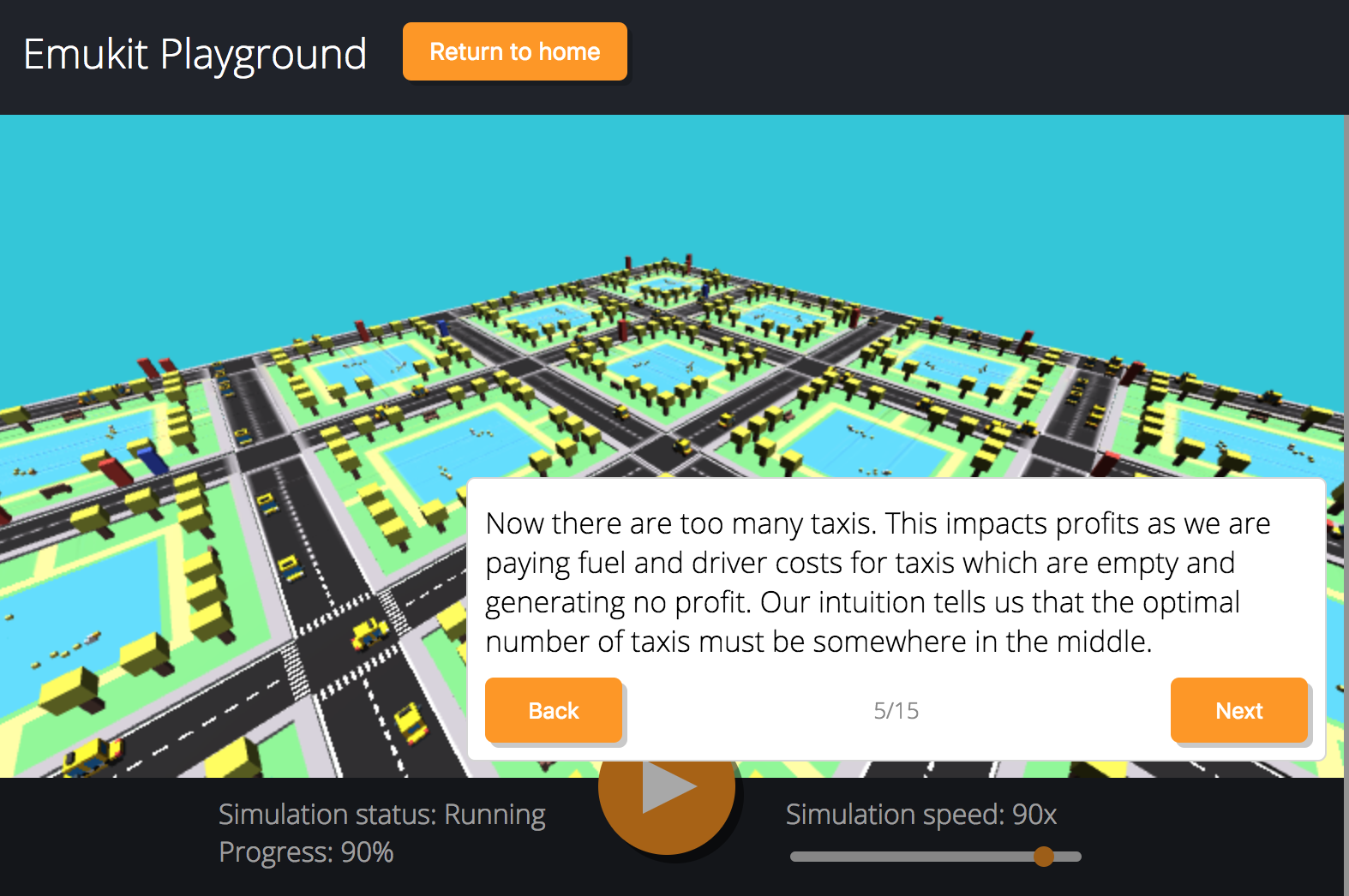
Emukit Playground
Thanks!
- twitter: @lawrennd
- podcast: The Talking Machines
- newspaper: Guardian Profile Page
- blog: http://inverseprobability.com