Generalization and Neural Networks
LT1, William Gates Building
Quadratic Loss and Linear System
Expected Loss
\[ R(\mathbf{ w}) = \int L(y, x, \mathbf{ w}) \mathbb{P}(y, x) \text{d}y \text{d}x. \]
Sample-Based Approximations
Sample based approximation: replace true expectation with sum over samples. \[ \int f(z) p(z) \text{d}z\approx \frac{1}{s}\sum_{i=1}^s f(z_i). \]
Allows us to approximate true integral with a sum \[ R(\mathbf{ w}) \approx \frac{1}{n}\sum_{i=1}^{n} L(y_i, x_i, \mathbf{ w}). \]
Basis Function Models
Polynomial Basis
\[ \phi_j(x) = x^j \]
Functions Derived from Polynomial Basis
\[ f(x) = {\color{cyan}{w_0}} + {\color{green}{w_1 x}} + {\color{yellow}{w_2 x^2}} + {\color{magenta}{w_3 x^3}} + {\color{red}{w_4 x^4}} \]
- _2 ^2 + _3 ^3 + _4 ^4 $$ are linear in the parameters, \(\mathbf{ w}\), but non-linear in the input \(x^3\). Here we are showing a polynomial basis for a 1-dimensional input, \(x\), but basis functions can also be constructed for multidimensional inputs, \(\mathbf{ x}\).}
Olympic Marathon Data
|

|
Olympic Marathon Data
Polynomial Fits to Olympic Marthon Data
- Fit linear model with polynomial basis to marathon data.
- Try different numbers of basis functions (different degress of polynomial).
- Check the quality of fit.
Linear Fit
\[f(x, \mathbf{ w}) = w_0 + w_1x\]
Cubic Fit
\[f(x, \mathbf{ w}) = w_0 + w_1 x+ w_2 x^2 + w_3 x^3\]
9th Degree Polynomial Fit
\[f(x, \mathbf{ w}) = w_0 + w_1 x+ w_2 x^2 + \dots + w_9 x^9\]
16th Degree Polynomial Fit
\[f(x, \mathbf{ w}) = w_0 + w_1 x+ w_2 x^2 + \dots + w_{16} x^{16}\]
26th Degree Polynomial Fit
\[f(x, \mathbf{ w}) = w_0 + w_1 x+ w_2 x^2 + \dots + w_{26} x^{26}\]
The Bootstrap
\[ \mathbf{ y}, \mathbf{X}\sim \mathbb{P}(y, \mathbf{ x}) \]
Resample Dataset
Bootstrap and Olympic Marathon Data
Linear Fit
\[f(x, \mathbf{ w}) = w_0 + w_1 x\]
Cubic Fit
\[f(x, \mathbf{ w}) = w_0 + w_1 x+ w_2 x^2 + w_{3} x^3\]
9th Degree Polynomial Fit
\[f(x, \mathbf{ w}) = w_0 + w_1 x+ w_2 x^2 + \dots + w_{9} x^{9}\]
16th Degree Polynomial Fit
\[f(x, \mathbf{ w}) = w_0 + w_1 x+ w_2 x^2 + \dots + w_{16} x^{16}\]
Bias Variance Decomposition
Generalisation error \[\begin{align*} R(\mathbf{ w}) = & \int \left(y- f^*(\mathbf{ x})\right)^2 \mathbb{P}(y, \mathbf{ x}) \text{d}y\text{d}\mathbf{ x}\\ & \triangleq \mathbb{E}\left[ \left(y- f^*(\mathbf{ x})\right)^2 \right]. \end{align*}\]
Decompose
Decompose as \[ \begin{align*} \mathbb{E}\left[ \left(y- f(\mathbf{ x})\right)^2 \right] = & \text{bias}\left[f^*(\mathbf{ x})\right]^2 \\ & + \text{variance}\left[f^*(\mathbf{ x})\right] \\ \\ &+\sigma^2, \end{align*} \]
Bias
Given by \[ \text{bias}\left[f^*(\mathbf{ x})\right] = \mathbb{E}\left[f^*(\mathbf{ x})\right] - f(\mathbf{ x}) \]
Error due to bias comes from a model that’s too simple.
Variance
Given by \[ \text{variance}\left[f^*(\mathbf{ x})\right] = \mathbb{E}\left[\left(f^*(\mathbf{ x}) - \mathbb{E}\left[f^*(\mathbf{ x})\right]\right)^2\right]. \]
Slight variations in the training set cause changes in the prediction. Error due to variance is error in the model due to an overly complex model.
Regularization
Linear system, solve:
\[ \boldsymbol{ \Phi}^\top\boldsymbol{ \Phi}\mathbf{ w}= \boldsymbol{ \Phi}^\top\mathbf{ y} \] But if \(\boldsymbol{ \Phi}^\top\boldsymbol{ \Phi}\) then this is not well posed.
Tikhonov Regularization
- Updated objective: \[ L(\mathbf{ w}) = (\mathbf{ y}- \mathbf{ f})^\top(\mathbf{ y}- \mathbf{ f}) + \alpha\left\Vert \mathbf{W} \right\Vert_2^2 \]
- Hessian: \[ \boldsymbol{ \Phi}^\top\boldsymbol{ \Phi}+ \alpha \mathbf{I} \]
Splines, Functions, Hilbert Kernels
- Can also regularize the function \(f(\cdot)\) directly.
- This approach taken in splines and Wahba (1990) and kernels Schölkopf and Smola (2001).
- Mathematically more elegant, but algorithmically less flexible and harder to scale.
Training with Noise
- Other regularisation approaches such as dropout (Srivastava et al., 2014)
- Often perturbing the neural network structure or inputs.
- Can have elegant interpretations (see e.g. Bishop (1995))
- Also interpreted as ensemble or Bayesian methods.
Shallow and Deep Learning
Deep Neural Network
Deep Neural Network
Mathematically
\[ \begin{align*} \mathbf{ h}_{1} &= \phi\left(\mathbf{W}_1 \mathbf{ x}\right)\\ \mathbf{ h}_{2} &= \phi\left(\mathbf{W}_2\mathbf{ h}_{1}\right)\\ \mathbf{ h}_{3} &= \phi\left(\mathbf{W}_3 \mathbf{ h}_{2}\right)\\ f&= \mathbf{ w}_4 ^\top\mathbf{ h}_{3} \end{align*} \]
Neural Network Prediction Function
\[ f(\mathbf{ x}; \mathbf{W}) = \mathbf{ w}_4 ^\top\phi\left(\mathbf{W}_3 \phi\left(\mathbf{W}_2\phi\left(\mathbf{W}_1 \mathbf{ x}\right)\right)\right). \]
Overparameterised Systems
- Neural networks are highly overparameterised.
- If we could examine their Hessian at “optimum”
- Very low (or negative) eigenvalues.
- Error function is not sensitive to changes in parameters.
- Implies parmeters are badly determined
Whence Generalisation?
- Not enough regularisation in our objective functions to explain.
- Neural network models are not using traditional generalisation approaches.
- The ability of these models to generalise must be coming somehow from the algorithm*
- How to explain it and control it is perhaps the most interesting theoretical question for neural networks.
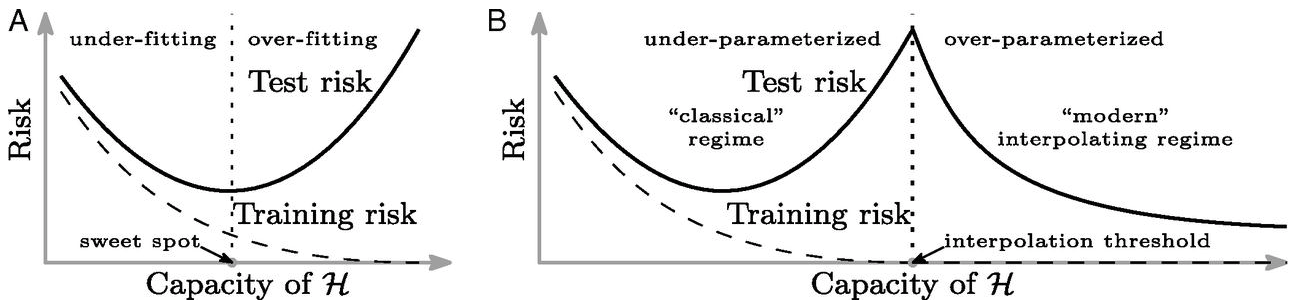
Double Descent
Neural Tangent Kernel
- Consider very wide neural networks.
- Consider particular initialisation.
- Deep neural network is regularising with a particular kernel.
- This is known as the neural tangent kernel (Jacot et al., 2018).
Regularization in Optimization
- Gradient flow methods allow us to study nature of optima.
- In particular systems, with given initialisations, we can show L1 and L2 norms are minimised.
- In other cases the rank of \(\mathbf{W}\) is minimised.
- Questions remain over the nature of this regularisation in neural networks.
Deep Linear Models
\[ f(\mathbf{ x}; \mathbf{W}) = \mathbf{W}_4 \mathbf{W}_3 \mathbf{W}_2 \mathbf{W}_1 \mathbf{ x}. \]
\[ \mathbf{W}= \mathbf{W}_4 \mathbf{W}_3 \mathbf{W}_2 \mathbf{W}_1 \]
Thanks!
twitter: @lawrennd
podcast: The Talking Machines
newspaper: Guardian Profile Page
blog posts:
References
bootstrap
David Hogg’s lecture https://speakerdeck.com/dwhgg/linear-regression-with-huge-numbers-of-parameters
The Deep Bootstrap https://twitter.com/PreetumNakkiran/status/1318007088321335297?s=20
Aki Vehtari on Leave One Out Uncertainty: https://arxiv.org/abs/2008.10296 (check for his references).